ねじ穴検査ロボットシステム
- トップ
- FAシステム/プラント設備製造
- ロボットシステムインテグレーション
- ねじ穴検査ロボットシステム
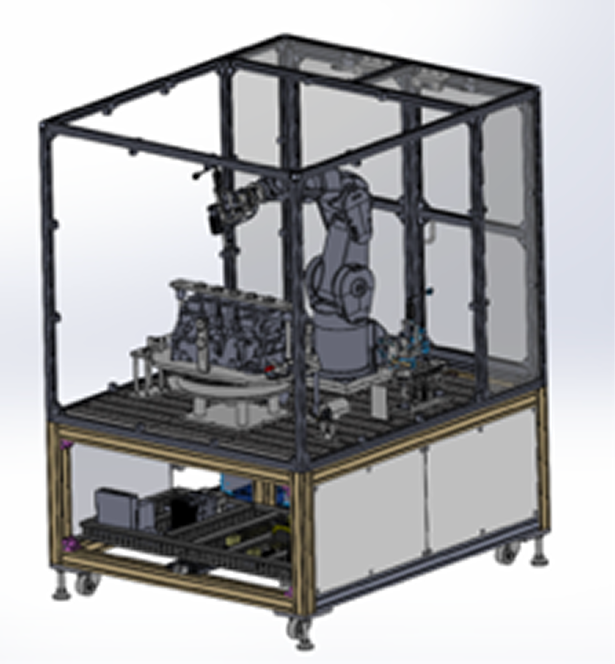
ねじ穴検査ロボットシステム MTR-001
アナログからデジタルへ。ねじ穴のGo-Stop検査とデータのデジタル活用を実現!
問題点
今までは、検査員の経験に頼っていて検査基準が属人的だったり、検査員の疲労や人件費の負担などがありました。
計測結果や合否判定の記録は、紙媒体しか残せないことが多く、定量比較しにくいです。検査部品の段取り替えでは、ロボットティーチングに時間がかかることもあります。
マクシスだからできること
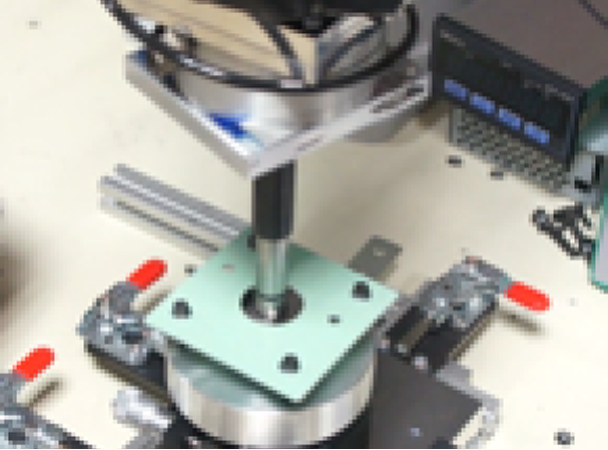
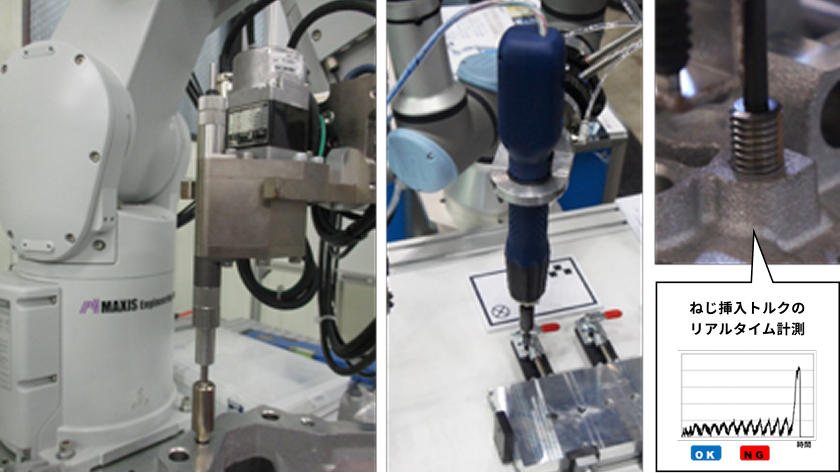
「ねじゲージ」を持ったロボットに、力覚センサやカメラ、画像解析技術を搭載することにより、通·止め検査のロボット化を実現します。部品ごとの検査結果をデジタルデータで保管でき、定量比較を容易にします。この検査結果の定量比較から、加工ツールの劣化の予兆保全を目指します。
検査部品の段取り替えでは、3Dデータでの座標軸を取り組み、ハンド搭載カメラにて「ねじゲージ」位置の誤差補正を行なうことで、ロボットティーチングレス化を目指します。
紹介動画
標準仕様例
| 検査項目 | ねじ穴有効径(通·止ゲージ) ねじ穴深さ(リニアスケール) |
|---|---|
| 検査サイズ | M6 ~ M20 |
| 検査時間 | 10 秒/穴 (※1) |
| 装置外形 | W 1200 × D 1400 × H 1800 (mm) |
| 装置重量 | 500 kg (※2) |
| 電源 | 三相 AC200 V |
- ※1 ねじゲージの付け替え時間を別に要します。
- ※2 検査部品の大きさや重量に応じて異なります。検査部品の形状により変動がございます。
検査部品例
エンジン周辺自動車関連のダイキャスト部品や家電関連部品など

特注事例
スコープカメラでの
ねじ穴内検査

エアマイクロゲージでの
穴径計測